Solo is a Linux system (iMX.6 running Yocto Linux) connected to a Pixhawk™ autopilot.
The Pixhawk™ controls flight modes, stabilization, and recovery in the case of an RTL event (return-to-launch). Pixhawk™ communicates over the MAVLink telemetry protocol to both the on-board Linux computer and downstream devices like the Controller and mobile phone Solo apps.
The Linux system controls high-level operation of the copter: smart shots, camera and gimbal control, mobile app communication, and accessory interaction are all implemented in this layer.
The diagram below is a simplified view of the main elements of the Solo architecture.
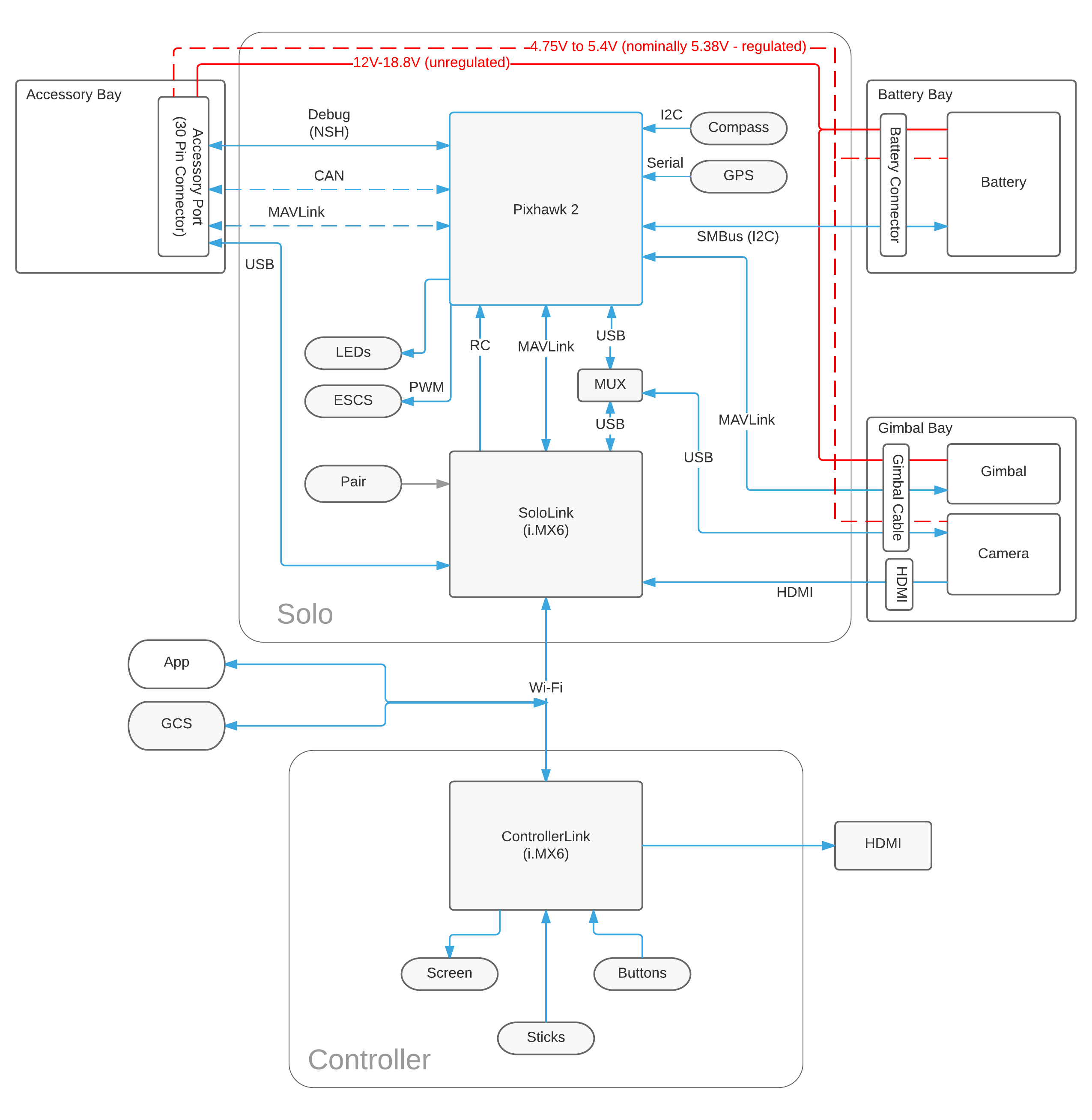
Data lines shown in solid blue with arrows showing the direction of data flow. Power lines are shown in red. Dashed-blue data lines to payload bays indicate data lines that are not available/supported for third-party use.